ENG_607538.XML

P_D213_XX_00055

P_D213_XX_00046
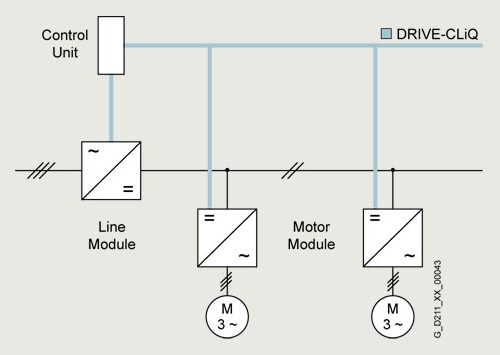
With its separate power unit and Control Unit, the SINAMICS S120 drive system can be perfectly adapted to a wide variety of different drive tasks.
The Control Unit is selected according to the number of drives to be controlled and the required performance level, while the power unit must be rated to meet requirements regarding regenerative feedback capability or energy exchange. The connection between the Control Unit and power unit is made very simply using the DRIVE-CLiQ digital system interface.
The following devices are available in chassis-2 format:
- Active Infeeds (Active Line Module and Active Interface Module)
- Motor Modules
Highlights of the built-in units in chassis-2 format
- Compact, innovative mechanical design with reduced footprint
- Rated pulse frequency of the Motor Modules 2.5 kHz
- Optimized derating
- Innovative cooling concept
- Condition monitoring
- Very easy replacement of the device fans
Active Infeed
Active Infeeds comprise an Active Line Module and an Active Interface Module. Active Line Modules contain the central line infeed for the intermediate DC circuit. They can supply energy and return regenerative energy to the supply system.
Active Line Modules produce a stabilized DC voltage that remains constant regardless of fluctuations in the line voltage if the line voltage remains within the permissible tolerances. Active Line Modules in combination with an Active Interface Module draw a virtually sinusoidal current from the supply system. Almost no harmonics occur.
The total harmonic distortion factors of the current THD(I) and voltage THD(U) are typically in the range of approx. 3 % for rated current. THD(I) is calculated according to IEEE 519 (2014) and THD(U) according to IEC 61000-2-4 (2002). The stringent limit values of IEEE 519 (2014) are typically complied with.

G_D211_XX_00446
Motor Modules
A voltage DC link and an inverter for supplying a motor are integrated in the Motor Module.
G_D211_XX_00043
Motor Modules are designed for multi-axis drive systems and are controlled by either a CU320-2 Control Unit or a SIMOTION D Control Unit. Motor Modules are interconnected through the DC link.
One or several Motor Modules are supplied with energy for the motors via the DC link. Both synchronous and asynchronous motors can be operated.
Since the Motor Modules share the same DC link, they can exchange energy with one another, i.e. if one Motor Module operating in the generator mode produces energy, the energy can be used by another Motor Module operating in the motor mode. The DC link is supplied with line supply voltage by a Line Module.
Control Units
The control intelligence for all the drive axes integrated in the multi-axis group is combined in the Control Units. They also feature drive-related inputs/outputs and interfaces for communicating with higher-level controllers. Control Units are available with different ranges of functions and with different performance levels.
System components
The structure of the drive system is defined by selecting the Control Unit, Line Modules and Motor Modules. The additional components provided allow optimum adaptation of the drive system to the application.
These components are subdivided into:
-
Line-side components, e.g. components for pre-charging
-
DC link components, e.g. DC link fuses
-
Motor-side components, e.g. motor reactors and dv/dt filters plus VPL
-
Supplementary system components, e.g. Terminal Modules, Operator Panels, and Communication Boards
-
Encoder system interface for connecting various encoder types to SINAMICS S120
DRIVE-CLiQ – the digital interface between the components
The SINAMICS S120 components, including the motors and encoders, are equipped with the high-performance DRIVE-CLiQ system interface. DRIVE-CLiQ interfaces are used, for example, to connect Line Modules and Motor Modules to the Control Unit, as well as Terminal Modules and Sensor Modules to the drive system – simply and efficiently. Motors that also have this interface can be directly connected to the drive system.
Converter boards (Sensor Modules) for converting standard encoder signals to DRIVE-CLiQ are available for third-party motors or retrofit applications.
The electronic rating plate
An important digital linkage element of the SINAMICS S120 drive system are the electronic rating plates integrated in every component. They allow all drive components to be automatically identified via the DRIVE-CLiQ link.
The electronic rating plate contains all the relevant technical data about that particular component. In addition to the technical data, the rating plate includes logistical data (manufacturer ID, article number and ID). Since this data can be called up electronically on site or remotely, all the components used in a machine can always be individually identified, which helps simplify servicing.
Coated modules
The following devices are equipped as standard with coated modules:
- Devices in chassis‑2 format
- Control Units
- Sensor Modules
- Terminal Modules
- Advanced Operator Panel (AOP30)
The coating on the modules protects the sensitive SMD components against corrosive gases, chemically active dust and moisture.
Nickel-plated busbars
All of the copper busbars used are nickel-plated in order to achieve the best possible immunity to environmental effects. Furthermore, there is no need to clean the contacts on the customer terminals as otherwise required for bare copper connections.
Note:
For some components, parts of the copper busbars cannot be nickel-plated for technical reasons.
ENG_673178.xml
Communication with higher-level controller
As customer interface to a higher-level control, as standard there is a PROFIBUS or PROFINET communication interface on the Control Unit CU320-2; there are also expansions such as the Terminal Module TM31, the Terminal Board TB30 and modules to communicate via CANopen or EtherNet/IP.
These interfaces can be used to connect the system to the higher-level controller using analog and digital signals, or to connect additional units.
For additional information, please refer to the SINAMICS Low Voltage Engineering Manual.
Open-loop and closed-loop control functions
SINAMICS S120 can use a dynamic, high-precision closed-loop vector control (drive object type VECTOR), or a highly dynamic closed-loop servo control (drive object type SERVO).
Software and protective functions
The software functions available as standard are described below:
|
Software and protective functions
|
Description
|
|
Setpoint input
|
The setpoint can be specified both internally and externally; internally as a fixed setpoint, motorized potentiometer setpoint or jog setpoint, externally via the communications interface or an analog input. The internal fixed setpoint and the motorized potentiometer setpoint can be switched or adjusted via control commands from any interface.
|
|
Motor identification
|
The automatic motor identification function makes commissioning faster and easier and optimizes closed-loop control of the drive.
|
|
Ramp-function generator
|
A user-friendly ramp-function generator with separately adjustable ramp-up and ramp-down times, together with adjustable rounding times in the lower and upper speed ranges, allows the drive to be smoothly accelerated and braked. This results in a good speed control response and contributes to the reduction of stress on the mechanical system. The down ramp can be parameterized separately for a quick stop.
|
|
Vdc max controller
|
The Vdc max controller automatically prevents overvoltage in the DC link, if the set down ramp is too short, for example. This may also extend the set ramp-down time.
Note: This function only makes sense for single-axis applications.
|
|
Kinetic buffering (KIP)
|
For brief line supply failures, the kinetic energy of the rotating drive is used to buffer the DC link and therefore prevents fault trips. The converter remains operational as long as the drive can provide regenerative energy as a result of its motion and the DC link voltage does not drop below the shutdown threshold. When the line supply recovers within this time, the drive is smoothly accelerated up to its setpoint speed again.
|
|
Automatic restart
|
The automatic restart switches the drive on again when the power is restored after a power failure, and ramps up to the current speed setpoint.
|
|
Flying restart
|
The flying restart function allows the converter to be switched to a motor that is still turning. With the voltage sensing capability provided by the optional VSM10, the flying restart time for large asynchronous motors can be significantly reduced because the motor does not need to be de-magnetized.
|
|
Technology controller (PID)
|
Using the technology controller (PID controller) function module, level or flow controls and complex tension controls can be implemented, for example. The existing D component can act both on the system deviation as well as on the actual value (factory setting). The P, I, and D components are set separately.
|
|
Free function blocks (FFB)
|
Using the freely programmable function blocks, it is easy to implement logic and arithmetic functions for controlling the SINAMICS drive. The blocks can be programmed at the operator panel or the STARTER commissioning tool.
|
|
Drive Control Chart (DCC)
|
SINAMICS DCC comprises the block library, so-called DCB Drive Control Blocks and the DCC Editor for graphical interconnection of blocks. SINAMICS DCC is primarily employed to solve arithmetic and control-related tasks or logic functions associated with complex applications.
In addition to the DCB Standard library, the DCB Extension library can also be used to create applications.
The DCB Extension library is comprised of freely programmable blocks which are created for specific applications using DCB Studio and are then graphically interconnected with the DCC Editor in a similar fashion to standard blocks.
|
|
SINAMICS Technology Extensions (SINAMICS TEC)
|
SINAMICS Technology Extensions are configurable firmware expansions of Siemens that are specifically created for use in a customized application with special requirements.
This functionality can therefore be subsequently installed as an add-on to the standard scope of firmware functions.
|
|
I2t sensing for motor protection
|
A motor model stored in the converter software calculates the motor temperature based on the current speed and load. More exact sensing of the temperature, which also takes into account the influence of the ambient temperature, is possible by means of direct temperature sensing using Pt1000/KTY84 sensors in the motor winding.
|
|
Motor temperature evaluation
|
Motor protection by evaluating a KTY84, PTC, Pt100 or Pt1000 temperature sensor. When a KTY84 temperature sensor is connected, the limit values can be set for alarm or shutdown. When a PTC thermistor is connected, the system reaction to triggering of the thermistor (alarm or trip) can be defined.
|
|
Motor blocking protection
|
A blocked motor is detected and protected against thermal overloading by a fault trip.
|
|
Brake control
|
"Simple brake control" for control of holding brakes:
The holding brake is used to secure drives against unwanted motion when deactivated.
"Extended brake control" function module for complex brake control, e.g. for motor holding brakes and operational brakes:
When braking with a feedback signal, the brake control reacts to the feedback signal contacts of the brake.
|
|
Write protection
|
Write protection to prevent unintentional changing of the setting parameters (without password function).
|
|
Know-how protection
|
Know-how protection for encrypting stored data, e.g. to protect configuration know-how, and to protect against changes and duplication (with password function)
|
|
Web server
|
The web server provides information about the drive unit via its web pages. The web server is accessed using an Internet browser via unsecured (http) or secured transfer protocol (https).
|
Power unit protection
|
Power unit protection
|
Description
|
|
Ground fault monitoring at the output
|
A ground fault at the output is detected by a total current monitor and results in shutdown in grounded systems.
|
|
Electronic short-circuit protection at the output
|
A short-circuit at the output (e.g. at the converter output terminals, in the motor cable or in the motor terminal box) is detected and the converter shuts down with "fault".
|
|
Thermal overload protection
|
An alarm is issued first when the overtemperature threshold responds. If the temperature continues to rise, the unit either shuts down or independently adjusts the pulse frequency or output current so that thermal load is reduced. Once the cause of the fault has been eliminated (e.g. cooling has been improved), the original operating values are automatically resumed.
|
