ENG_330154.XML
The user‑friendly STARTER commissioning tool can be used for:
- Commissioning
- Optimization
- Diagnostics
This software can be operated either as a standalone PC application, integrated in SIMATIC STEP 7 with TIA compatibility via Drive ES Basic, as well as integrated in the SIMOTION Engineering Software SCOUT. In both cases, basic functions and handling are identical.
First commissioning is guided by a wizard which makes all the basic settings in the drive. Therefore, getting a motor up and running is merely a question of setting a few of the drive parameters as part of the drive configuration process. The travel commands can be simply entered from the PC via the control panel.
The individual settings are made using graphic parameterizing screen forms, which precisely visualize the principle of operation of the drive (see figure "STARTER project navigator"), or as before, using the expert list (see figure "Parameter assignment using the expert list").
In addition, the following functions are available for optimization purposes:
- Self‑optimization of the controller settings
- Trace to precisely record the signals
S_D212_XX_00002
STARTER project navigator
ENG_330155.XML
Crane‑specific applications
Using STARTER, various pre‑configured standard applications for various crane applications are configured, for example:
- Single‑axis application for the hoist, trolley and gantry with control via PROFIBUS DP, via external I/O terminals or even via just the onboard I/O
- Two‑axis application for master‑slave closed‑loop torque control
- Can be selected using a script screen form (see figure "Script screen form to configure the axis, control and type of master switch")
For users, these solutions are "ready‑to‑run", i.e. they only have to appropriately set the parameters based on the parameter list (see figure "Parameter assignment using the expert list").

S_CR01_XX_00023
Script screen form to configure the axis, control and type of master switch
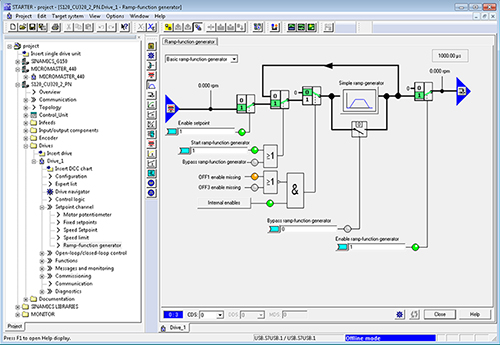
G_CR01_XX_00331
Speed channel of the hoist axis with control via PROFIBUS DP after running the script file
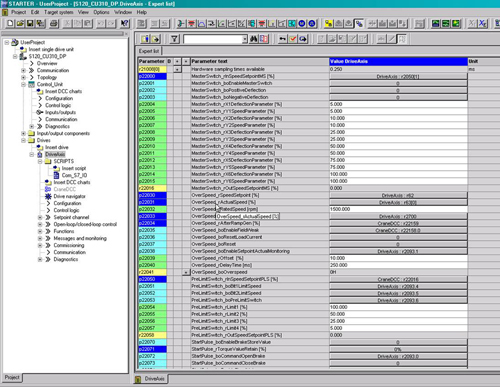
S_CR01_XX_00024
Parameter assignment using the expert list
In the case of individual adaptations and expansions, these standard applications can be used as a starting point for "ready‑to‑apply" applications. The Drive Control Chart (DCC) offers users the best option for making individual adaptations to address their precise requirements.
Optional Drive Control Chart (DCC) packages
With the optional Drive Control Chart (DCC) packages, available for SINAMICS, for simple graphic configurations it is possible to extend the technological functions using pre‑defined function blocks. Multi‑instance function blocks are selected from a pre‑defined library and graphically interconnected using drag and drop. The standard function block library includes a large number of open‑loop, arithmetic and logic blocks as well as comprehensive open‑loop and closed‑loop control functions. DCC provides users with a new dimension to individually adapted specific functions of his machine. Further, DCC is installed in the STARTER commissioning tool.
Note:
DCC must be selected when installing the STARTER commissioning tool. A license is required to generate and edit plans.

S_D211_XX_00006
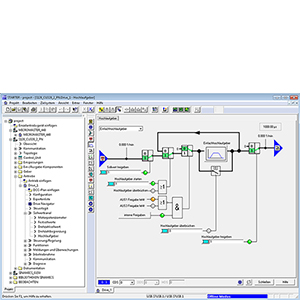
DCC graphic editor
The crane DCC blocks are preconfigured using the standard SINAMICS DCC Library. Each individual crane‑specific technology (e.g. load‑dependent field weakening) is optimally preconfigured in the crane DCC blocks, and encapsulated as individual macro block. These crane DCC blocks are used to process the speed setpoint channel of an individual axis (e.g. hoist with control via PROFIBUS DP after running the script file) and fast monitoring at the cycle level. In this way, clear control loops are presented, and the same crane DCC blocks can always be reused for various axes in various projects.
ENG_330156.XML
Standard applications
The standard applications encompass various pre-configured projects, which are ready for use to address various crane applications:
- Single-axis application for hoist, trolley and gantry with control via the onboard terminal strip or via PROFIBUS DP
- Two-axis application for master-slave closed-loop torque control
- Setpoint via a digital and an analog master switch
- Selectable using a script screen form
These solutions are suitable for "ready-to-run" applications (parameterized) or "ready-to-apply" applications (DCC). As a consequence, expandability and flexibility have been taken into account.
Crane-specific function modules
|
Function modules
|
Axis
|
Function
|
|
Hoist
|

G_SY02_XX_01817 |
- Load-dependent field weakening
- Prelimit switch
- Start pulse
- Master switch (digital or analog)
- Monitoring for overspeed
- Current distribution monitoring
|
|
Trolley
|
G_SY02_XX_01819 |
- Master switch (digital or analog)
- Prelimit switch
- Monitoring for overspeed
- Current distribution monitoring
|
|
Gantry
|
G_SY02_XX_01820 |
- Master switch (digital or analog)
- Prelimit switch
- Monitoring for overspeed
- Current distribution monitoring
|
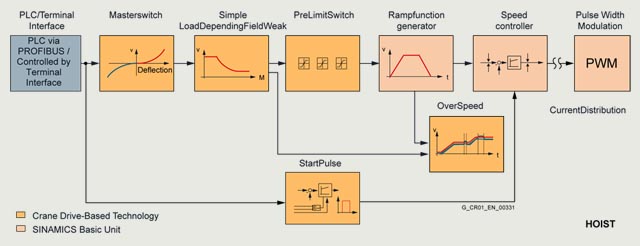
Overview of the crane technology at each axis
Technology functions
|
No.
|
Technology
|
Brief description
|
|
1
|
Load-dependent field weakening
|
Calculates the supplementary speed setpoints dependent on the load. When compared to full loads, partial loads automatically operate at a higher speed.
|
|
2
|
Prelimit switch (selectable limiting)
|
Allows the drive velocity to be limited when a pre-defined prelimit switch is reached.
|
|
3
|
Start pulse
|
Prevents "load sag" when hoists start with a suspended load.
|
|
4
|
Current distribution monitoring
|
Compares the current setpoints or actual values from the master and slave, and issues a signal for a deviation from a specified value.
|
|
5
|
Master switch
(digital or analog)
|
Facilitates a high drive travel precision via a directly connected master switch for manual positioning.
|
|
6
|
Monitoring for overspeed
|
Monitors for overspeed or detects deviations between speed setpoints and actual values.
|
|
7
|
Time-optimized positioning for a single axis
|
Allows the drive to be precisely traversed to the target position with the specified, maximum velocity and acceleration/deceleration within the shortest time.
|
|
8
|
Master-slave closed-loop torque control
|
When 2 motors operate on a common shaft, the master issues the torque setpoint for the slave. The master operates either closed-loop speed controlled or position controlled. The master-slave drive must be networked as part of the application (application engineering).
|
|
9
|
Brake control
|
The simple or extended brake control allows the user to parameterize rather than program the control. The combination of start pulse and brake control simplifies the engineering and commissioning for the user.
|
|
10
|
Safety Integrated
|
If required, the SINAMICS Safety Integrated Basic and Extended Functions are available for the user, e. g. STO, SLS.
|